




Un pas de géant pour la robotique
Qu'est-ce qui vient de se passer? Des chercheurs de l'Université de Manchester ont réussi à déchiffrer le code permettant de construire un robot sauteur surpuissant capable de s'élever à plus de 120 mètres dans les airs, soit bien plus haut que la Statue de la Liberté ou la tour Big Ben de Londres. C'est un énorme bond en avant par rapport au détenteur actuel du record du monde du robot sauteur le plus haut, qui ne peut atteindre « que » 33 mètres.
Cet objectif a été atteint en combinant mathématiques, simulations informatiques, expériences en laboratoire et, bien sûr, quelques ajustements à l’ancienne pour optimiser la taille, la forme et la disposition des pièces idéales du robot.
Selon l'étude publiée dans la revue Mechanism and Machine Theory, les robots sauteurs traditionnels ont tendance à être assez inefficaces, gaspillant de l'énergie dans des mouvements non intentionnels en plus de simplement monter en ligne droite. Soit ils décollent trop tôt avant d'étendre complètement leurs jambes élastiques, soit ils dévient de leur trajectoire avec des glissades latérales ou des pirouettes qui réduisent l'élan.
« Bien que les robots sauteurs existent déjà, la conception de ces machines de saut pose plusieurs défis majeurs, le principal étant de sauter suffisamment haut pour surmonter des obstacles importants et complexes. Notre conception améliorerait considérablement l'efficacité énergétique et les performances des robots sauteurs à ressorts », a déclaré dans un communiqué le Dr John Lo, co-auteur et chercheur associé en robotique spatiale à l'Université de Manchester.
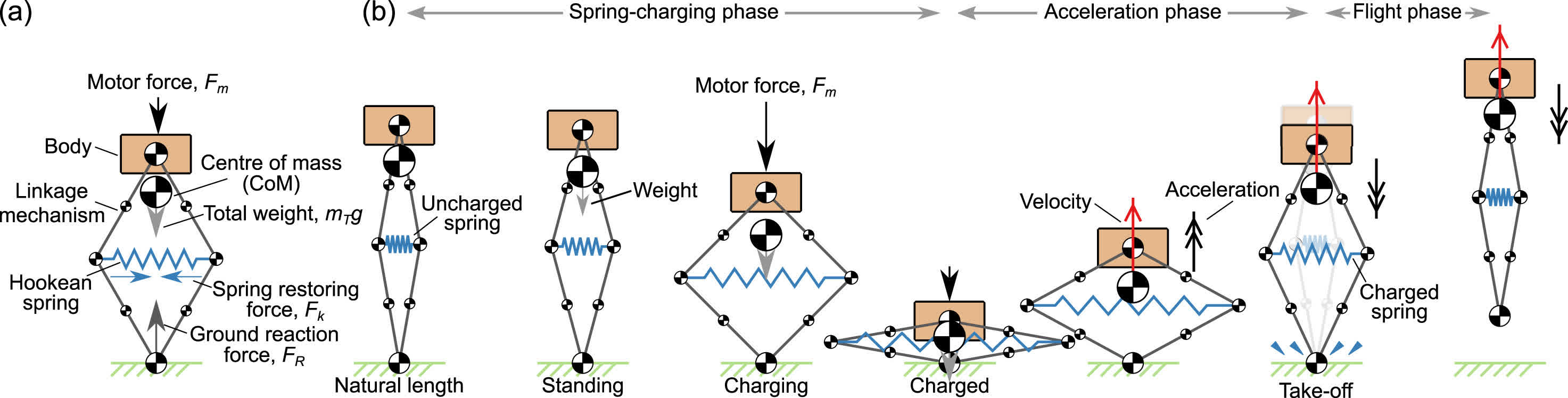
Les chercheurs ont décidé d'adopter une toute nouvelle approche. Ils ont d'abord analysé deux mécanismes de saut différents pour voir lequel fonctionnait le mieux : l'un avec un mouvement de jambe de type piston « prismatique » en ligne droite, et l'autre avec une articulation de type coup de pied de kangourou rotatif. Il s'est avéré que les deux avaient leurs avantages et leurs inconvénients.
Le modèle à piston s'alourdissait d'une masse trop importante, ce qui provoquait un retard inertiel avant le décollage. Pendant ce temps, ces jambes rotatives en rotation volaient de l'énergie en lançant le robot avant que les ressorts n'aient libéré toute leur énergie.
Cependant, en combinant les éléments les plus optimaux de chaque conception, l'équipe a trouvé un point idéal : déplacer la majeure partie du poids vers le haut pour plus de stabilité et utiliser de longues jambes droites à extension linéaire pour éviter un départ prématuré.
Maintenant que l’équipe a réussi le décollage, le prochain objectif est de contrôler la direction des sauts tout en améliorant le nombre de fois où le robot peut décoller avec une seule charge. Selon les scientifiques, cela peut être réalisé en exploitant l’énergie cinétique générée par les atterrissages – ce qui devrait être important si l’on considère que le robot percuterait le sol à une hauteur de plus de 100 mètres.
Les applications potentielles sont énormes. Imaginez de futurs robots sauteurs qui participeraient aux opérations de recherche et de sauvetage en sautant par-dessus des épaves ou en ouvrant de nouvelles pistes pour l'exploration planétaire en bondissant à travers des paysages extraterrestres. Pour l'espace, l'équipe prévoit d'explorer des conceptions plus compactes qui rendraient le robot plus facile à transporter et à déployer.