




Maîtriser l'art de balayer et d'évacuer les déchets
Que vient-il de se passer ? Des chercheurs ont développé un algorithme qui permet aux robots d'identifier de manière autonome leurs faiblesses et de les améliorer systématiquement en les pratiquant. C'est un peu comme donner aux machines leurs propres devoirs.
Le nouvel algorithme « Estimation, Extrapolation et Situation » (EES), développé par le laboratoire d'informatique et d'intelligence artificielle du MIT (CSAIL) et l'AI Institute, a récemment été présenté à la conférence Robotics: Science and Systems. Voici comment cela fonctionne :
Tout d’abord, le robot utilise son système de vision pour évaluer son environnement et la tâche à accomplir, comme nettoyer une pièce. L’algorithme évalue ensuite dans quelle mesure le robot peut actuellement effectuer des actions spécifiques, comme utiliser un balai pour balayer. Si EES détermine qu’une pratique supplémentaire sur une compétence particulière pourrait améliorer les performances globales, il lance cette pratique.
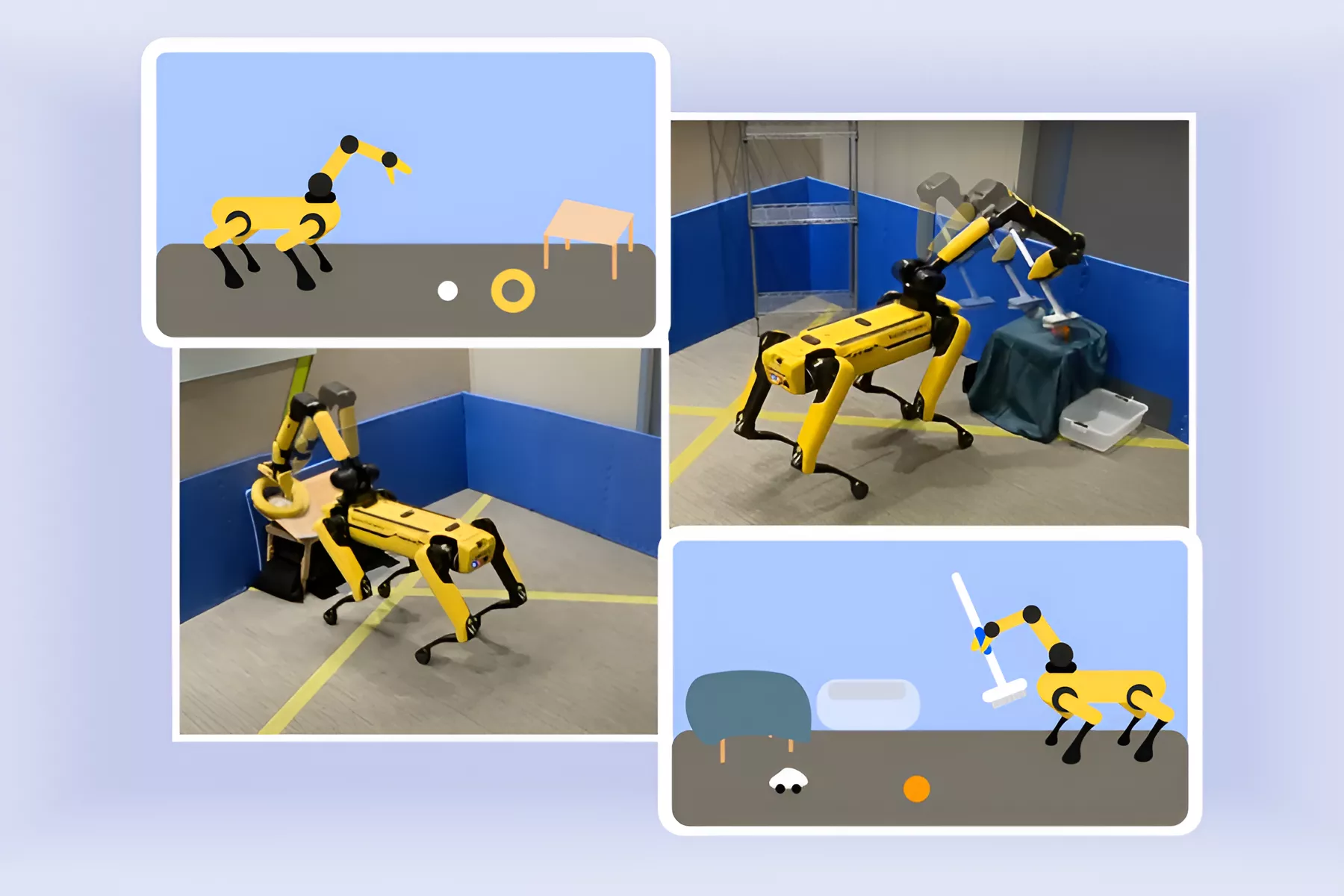
Les chercheurs ont testé l'EES sur le robot quadrupède Spot de Boston Dynamics, qui a déjà fait ses preuves dans ce type de tâches, notamment avec un bras fixé sur son dos. Cette fois, cependant, il a travaillé plus intelligemment, et non plus durement.
L'algorithme a guidé le robot dans la pratique et le perfectionnement de compétences utiles. Dans un essai, EES a permis à Spot d'apprendre à placer en toute sécurité une balle et un anneau sur une table inclinée en seulement trois heures environ. Dans un autre essai, le robot s'est amélioré dans la tâche apparemment aléatoire consistant à balayer les jouets dans une poubelle après environ deux heures de séances d'entraînement ciblées.
Les cadres précédents auraient probablement nécessité plus de 10 heures à Spot pour maîtriser l'une ou l'autre de ces compétences utiles.
Bien que ces tâches soient relativement basiques, les chercheurs notent que cette technologie pourrait éventuellement produire des robots capables d’apprendre à améliorer leurs performances dans divers environnements, tels que les usines, les cafés, les ménages ou les hôpitaux.
À l’avenir, ils espèrent intégrer des simulateurs pour que les robots puissent combiner des séances d’entraînement virtuelles et physiques, ce qui pourrait accélérer le processus d’apprentissage. Ils souhaitent également développer des algorithmes capables de raisonner sur des séquences de tentatives d’entraînement plutôt que de se concentrer uniquement sur des compétences isolées.
« Permettre aux robots d’apprendre par eux-mêmes est à la fois incroyablement utile et extrêmement difficile », a déclaré Danfei Xu, professeur à Georgia Tech et chercheur scientifique chez Nvidia AI, au MIT News. « À l’avenir, les robots domestiques seront vendus à toutes sortes de ménages et devront effectuer un large éventail de tâches. Nous ne pouvons pas programmer à l’avance tout ce qu’ils doivent savoir, il est donc essentiel qu’ils puissent apprendre sur le tas. »
Avec un dojo numérique comme EES sur lequel s’appuyer, les robots de demain pourraient maîtriser de nouvelles compétences aussi facilement que les humains – grâce à une bonne vieille pratique. L’article sur ce projet est disponible sur Arxiv.