




La conduite autonome avec un budget limité
Pourquoi c'est important : Les véhicules autonomes sont généralement équipés de réseaux de capteurs coûteux tels que des lidar, des radars et des caméras haute résolution. Mais un constructeur bricoleur a montré que pour certains environnements fermés, vous pouvez abandonner tous les équipements sophistiqués tout en conservant une conduite autonome avec une seule caméra.
Le YouTubeur Austin Blake fait partie de ces personnes qui possèdent un kart à pédales qu'ils ont eux-mêmes construit chez eux. Après l'avoir baptisé « Crazy Cart », il a décidé de le transformer en sa propre plateforme d'essais de conduite autonome. Pour cela, il a d’abord conçu une piste de fortune aménagée sur le sol de son atelier à l’aide de marqueurs rubans contrastés. Comme vous pouvez le voir sur l'image ci-dessous, l'espace est assez restreint, tout comme le rayon de braquage du chariot.

Puis vint la partie la plus difficile : donner à Crazy Cart ses compétences de conduite autonome. Pour cela, Blake a utilisé une technique appelée clonage comportemental via un modèle de réseau neuronal entraîné. Tout d’abord, il a enregistré environ 15 000 images tout en conduisant manuellement le kart sur la piste, en utilisant les angles de braquage à chaque point comme étiquettes d’entraînement. Il a ensuite introduit ces données dans un réseau neuronal convolutif, qui a appris à associer les entrées d'image aux directions de direction correspondantes.
Obtenir un modèle performant a nécessité pas mal d’essais et d’erreurs. Les premiers tests ont échoué car le réseau avait du mal à distinguer les bords des voies et à prendre des virages serrés. Blake a essayé des astuces d'augmentation des données, en peaufinant les hyperparamètres, en utilisant plusieurs caméras et même en ajoutant des objectifs grand angle pour améliorer le champ de vision.

Cependant, la véritable avancée s'est produite lorsqu'il a ajouté du ruban bleu vif comme bordure extérieure, augmentant ainsi le contraste.
Avec la piste clairement définie, sa création pourrait parcourir de manière autonome la piste au sol en utilisant simplement une vision monoculaire – aucun capteur coûteux n’est requis.
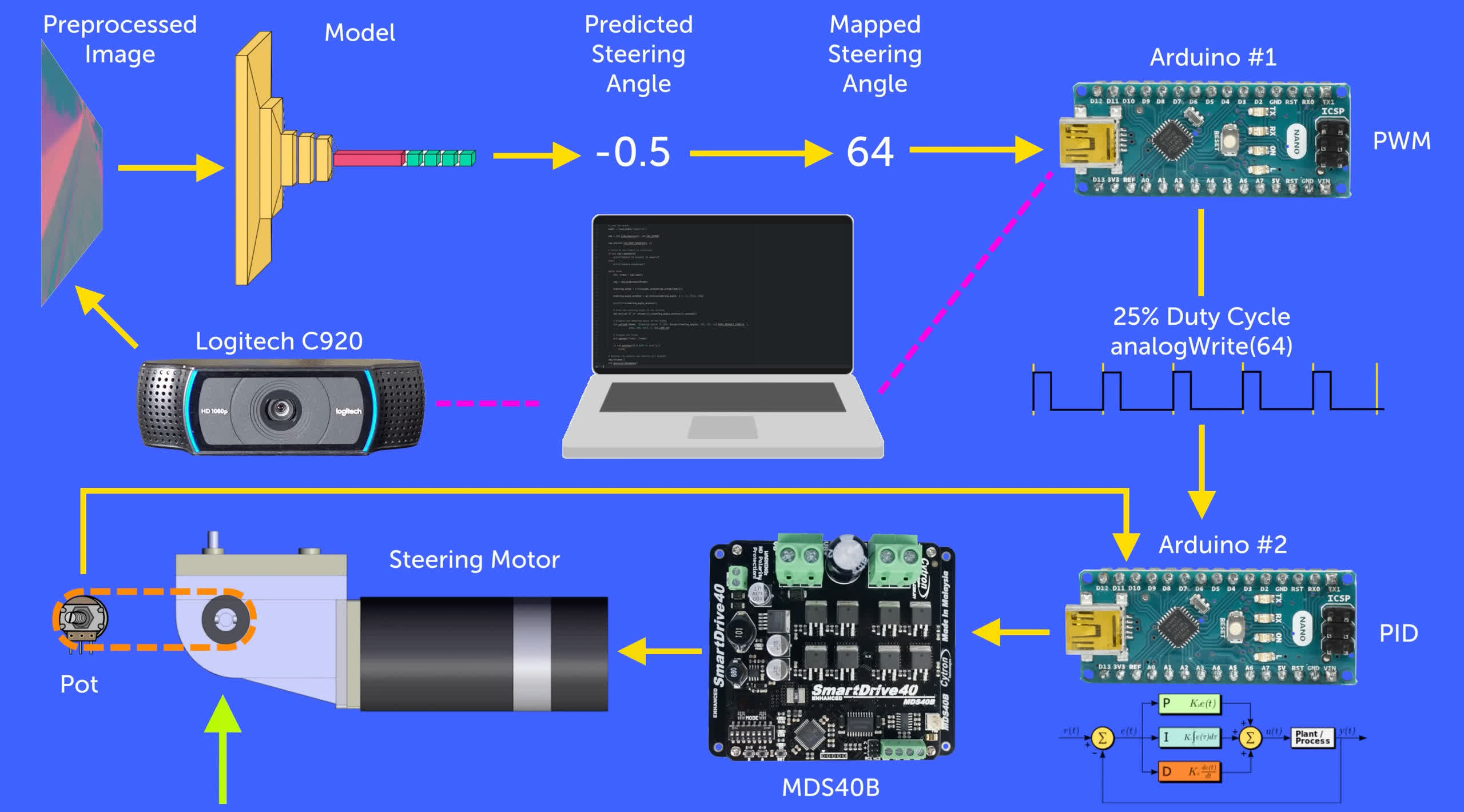
Cependant, il a fallu un total de trois Arduinos. L'un d'entre eux transmettait les prédictions de direction de l'ordinateur au deuxième Arduino, qui combinait ces données avec un retour de position pour faire fonctionner un moteur contrôlant l'angle de braquage. Le troisième Arduino gérait la manette des gaz en transmettant des signaux de commande au contrôleur de vitesse du kart.
Bien entendu, il s’agit d’un cas d’utilisation assez contraint par rapport à la navigation sur de véritables routes publiques avec leur complexité et leur imprévisibilité. Blake reconnaît volontiers que ce dernier est un défi exponentiellement plus difficile qui nécessite sans doute des données de capteur plus riches au-delà des seules caméras.
Pourtant, le projet constitue une démonstration impressionnante de la capacité de l’apprentissage automatique moderne à distiller l’intelligence de conduite à partir d’entrées de vision modestes. La mise à l'échelle du projet nécessitera probablement beaucoup plus de données de formation, mais une seule personne ne peut pas faire grand-chose.